

西松建設と奥村組は、シールド工事の掘進管理測量における既知点(座標や高さなどの情報が既に与えられている基準点)へのプリズム据え付け作業を自動化する測量システム「わんワン測量」を共同開発した。従来は人手に頼っていた作業を4足歩行ロボットに置き換えることで無人化を実現。西松建設が開発した自動測量対応トータルステーション(TS)を活用する「遠隔測量システム」と組み合わせることで、掘進管理測量の完全無人化が可能となる。
シールド工事の坑内測量は掘進作業終了後に実施する必要があり、従来は作業員が坑内に入り手作業で行っていた。長距離移動を伴うため残業の一因となるほか、小口径シールド工事では狭い空間での移動や測量作業が身体的負担となっていた。自動追尾TSを用いる場合でも、既知点間でプリズムを移設する際には人による作業が必要だった。
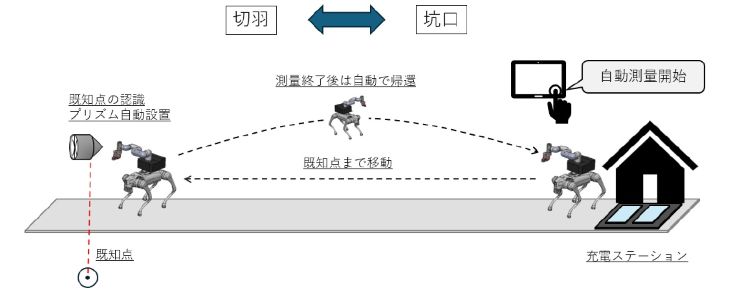
新システムは4足歩行ロボットとロボットアームを活用し、プリズム据え付け作業を自動化する。ロボットはトンネル線形や軌条設備に依存せず足場上を移動でき、遠隔操作による自動発進・帰還機能を備える。搭載した3D―LiDAR(レーザー式測距装置)センサーで取得した点群データと事前設定した座標情報を活用し、既知点まで自律移動する。
既知点到着後は重心を低くした安定姿勢をとり、ロボットアームを展開。先端カメラの画像をAI(人工知能)で解析しながらアームを最適制御し、既知点の鉛直上にプリズムを据え付ける。作業終了後は後方台車に設置した接触型の自動充電ステーションへ自動帰還し、充電を行う。
施工中のシールドトンネル工事で実証試験した結果、軌間に敷設した幅約480ミリの足場板上で自律移動できることや、曲線半径35メートルの急曲線区間でも安定歩行できることを確認した。プリズム据え付け精度は、2点間距離計測時の測定値の差が約2ミリだった。
今後はGNSS(衛星測位システム)などの測位技術と連携し、多様な建設工種への展開を図る。将来的には測量にとどまらず、センサー技術とAIを融合したフィジカルAIを高度化し、自律判断能力と環境適応力を備えた建設ロボットプラットフォームの構築を目指す。