



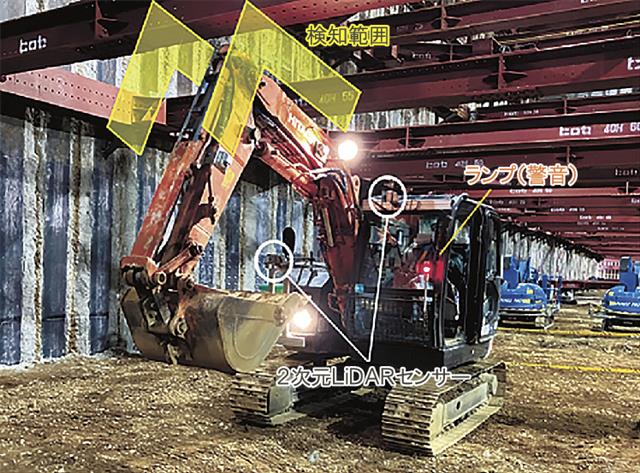
システムを装着したバックホー
鹿島は、鉄道やトンネル工事など狭あいな施工環境でのバックホー作業で、重機の接触や衝突による既設構造…

7月24日 木曜日
[ 2025-05-23 3面 ]







大成が大胆な人事制度改革/日本的雇用慣行から脱皮/成果報酬で“とがった”人材評価
2025-07-18 3面

名古屋市/名城エリアにぎわい共創構想案/歴史・文化軸に魅力創出
2025-07-18 10面

八丁堀の東京建設会館が移転/全建は8月4日、日建連は18日から業務開始
2025-07-15 1面

府中市に1万㎡共住/設計は長谷工、26年秋着工/三菱地所レジ
2025-07-22 4面

都道府県・政令市の発注業務遂行/「職員のみでは困難」7割/国交省
2025-07-18 1面