

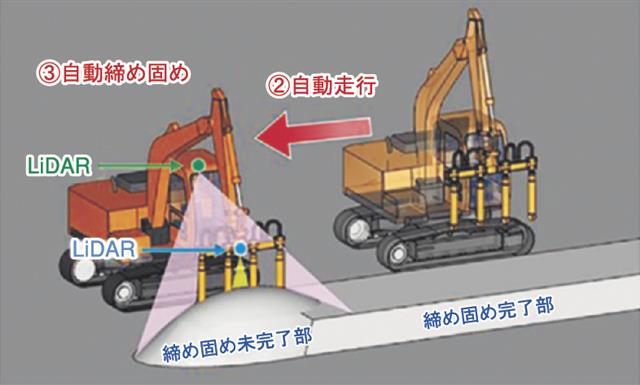
自動走行・締め固めイメージ
安藤ハザマは、ダム用油圧ショベル型バイブレーター(バイバック)の遠隔操作と自動運転を実現するシステム「RABV(ラ・ビブ=Remote Automated Backhoe with Vibrator)」を開発した。さらなる実証実験や国の「自動施工における安全ルール」への適合を図ることで、製品としての信頼性を高める。最終的にはダム施工現場への適用を目指す。
建設業全体で担い手不足が課題となる中、特にダム工事は、立地がへき地で特殊な技能を要するため、省力化、省人化が求められている。今回、ダムの堤体コンクリート打設作業において、特に作業の熟練度が必要なバイバックの遠隔化、自動化により、締め固め作業の省人化、省力化を目指した。
ラ・ビブは、▽遠隔操作プログラム▽自動走行プログラム▽自動締め固めプログラム--の三つで構成する。
遠隔操作プログラムでは、開発したバイブレーターの旋回や振動の開始・停止を遠隔で操作できるプログラムを、汎用(はんよう)のバックホー遠隔操作装置と組み合わせることで、バイバック全体の遠隔化を実現する。
自動走行プログラムでは、堤体コンクリートの打設順序を示すレーンスケジュールをプログラム上で再現し、打設箇所を選択することで、バイバックを自動走行させる機能を備えている。
自動締め固めプログラムでは、打設箇所に対して、バイブレーターの差し込み位置・順序を設定し、バイバックの位置と姿勢を自動で認識することで、計画どおり締め固めを行える。また、バイバック本体に取り付けたLiDAR(レーザー式測距装置)により、打設箇所内のコンクリート形状を認識し、バイブレーターの差し込み位置・順序の修正やコンクリート表面の高さに応じた引き抜き判断を自動で行う。
ダムコンクリートの模擬材を用いた実証実験の結果、各機能が有効に働き、適切なコンクリートの締め固めが実施できることを確認した。