




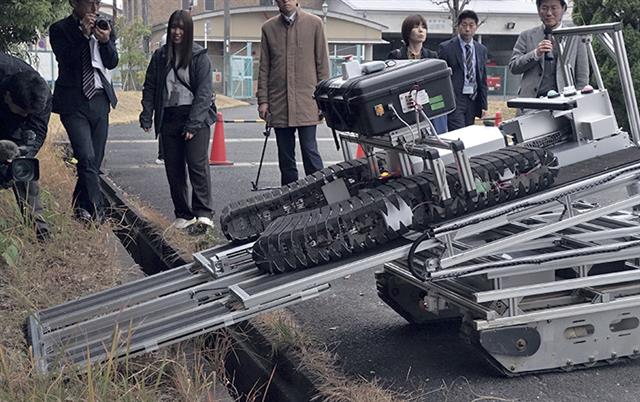
現場での「偵察」(上)と「排水」を想定したロボットのデモンストレーションを実施した

土砂ダムといわれる河道閉塞(へいそく)の対策現場で、調査復旧に対応するロボットシステムの開発に取り組む大阪工業大学などの研究者チームが11月27日、大阪府枚方市にある同大枚方キャンパスで、デモンストレーションを公開した。現場での「偵察」と、ポンプを使った「排水」を想定した内容で、実現すれば土砂ダム解消作業の無人化が期待される。
同大ロボティクス&デザイン工学部の大須賀公一教授らのグループが主催した。同研究は、内閣府などが推進する「ムーンショット型研究開発事業」の一環。
使用した機材は、排水用のホースを設置する「i-centiPot-Ammonite(アイセンチポットアンモナイト)」やクローラーロボット「d-Frex-Crow(ディーフレックスクロー)」、ロボットを格納して搬送する汎用(はんよう)搬送コンテナ「BRAIS(ブレインズ)」など4種類。現地までヘリコプターで運搬し、いずれも遠隔操作で作動する。
現場の状況に応じ、ロボットを組み替えて使用する点も特徴で、「臨機応変な地形踏破」を実現する。
大須賀教授は研究の狙いについて、人間が容易に近づけず、大型機材も運搬できない環境下でも柔軟に状況に対応可能な「新しい発想に基づいた革新的土工システムを目指している」と説明した。
今後はスケールアップした実証機の開発に取り組み、AI(人工知能)を使った半自律システムの導入も図る。2030年ごろにはプロトタイプ機を制作するなど、早期の実用化を目指す考えだ。
同大ロボティクス&デザイン工学部の大須賀公一教授らのグループが主催した。同研究は、内閣府などが推進する「ムーンショット型研究開発事業」の一環。
使用した機材は、排水用のホースを設置する「i-centiPot-Ammonite(アイセンチポットアンモナイト)」やクローラーロボット「d-Frex-Crow(ディーフレックスクロー)」、ロボットを格納して搬送する汎用(はんよう)搬送コンテナ「BRAIS(ブレインズ)」など4種類。現地までヘリコプターで運搬し、いずれも遠隔操作で作動する。
現場の状況に応じ、ロボットを組み替えて使用する点も特徴で、「臨機応変な地形踏破」を実現する。
大須賀教授は研究の狙いについて、人間が容易に近づけず、大型機材も運搬できない環境下でも柔軟に状況に対応可能な「新しい発想に基づいた革新的土工システムを目指している」と説明した。
今後はスケールアップした実証機の開発に取り組み、AI(人工知能)を使った半自律システムの導入も図る。2030年ごろにはプロトタイプ機を制作するなど、早期の実用化を目指す考えだ。