




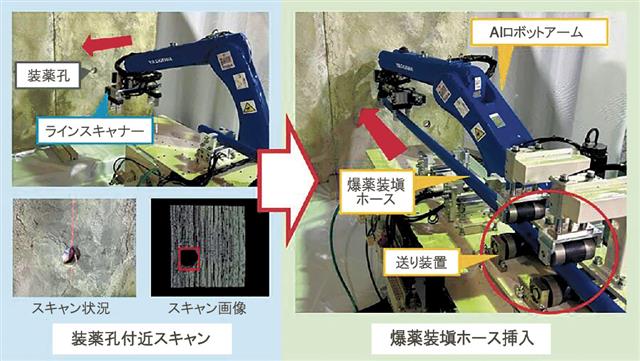
爆薬装填ホース自動挿入装置の概要
戸田建設は、山岳トンネル発破作業の安全性向上に向けて、切り羽作業の無人化に寄与する爆薬装てんホース…

9月22日 月曜日
[ 2025-07-25 3面 ]







八芳園本館の全面リニューアル/10月1日にグランドオープン/「庭の声を聞く」/既存…
2025-09-18 5面

2025-09-17 13面

そこが聞きたい・三井住友建設常務執行役員建築本部長 濱野 哲也氏
2025-09-19 3面

実績要件に体育施設5500平米/10月21日まで申請/WTO総合スポーツセンター/…
2025-09-16 5面

2025-09-18 6面