

操作者の動きを再現して水を注ぐロボット
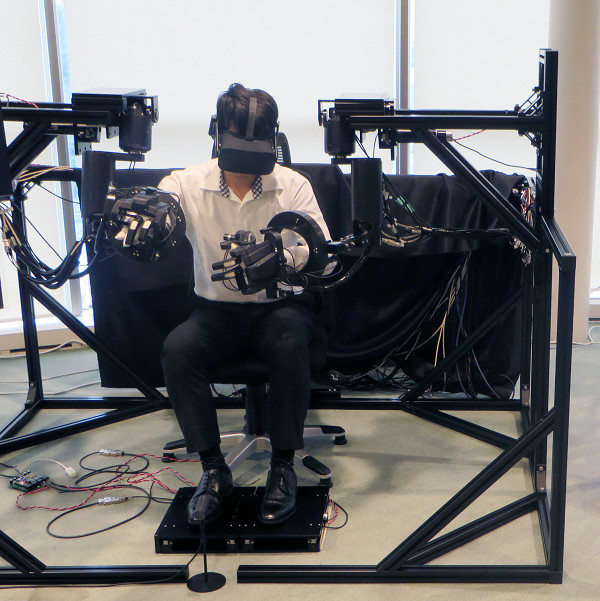
General Purpose Armは、操作用システムのマスターと、作業用システムのスレーブで構成される。マスターを装着した操作者の動きをスレーブが忠実に再現するとともに、スレーブが物体に触れた感覚をマスターに伝送し、操作者はその物体に直接触れているような感覚を得られる。ヘッドマウントディスプレーとステレオカメラからなるビジョンシステムにより操作者はスレーブの視覚、聴覚情報を共有でき、頭の動きに連動して視野も変化する。
スレーブには移動機構も備えている。マスターの足下にある筋収縮測定システムで操作者が足を動かそうとする力を検知し、スレーブを前後進、回転させることができる。任意の動作情報のデータを記録し、ロボットに再生させることで、操作者が不在でも同様の動きを再現できるほか、編集により動きの高速化なども実現する。
遠隔地からロボットの操作が可能となるため、放射線環境下や高所、深海など危険が伴う場所や人間が立ち入れない個所でも、安全で確実な作業が期待できる。開発を手掛ける野崎貴裕慶應大理工学部システムデザイン工学科助教は「この技術を幅広い分野で実用化させていきたい」としており、建設機械分野での実用化に向けた共同研究開発も進めている。