

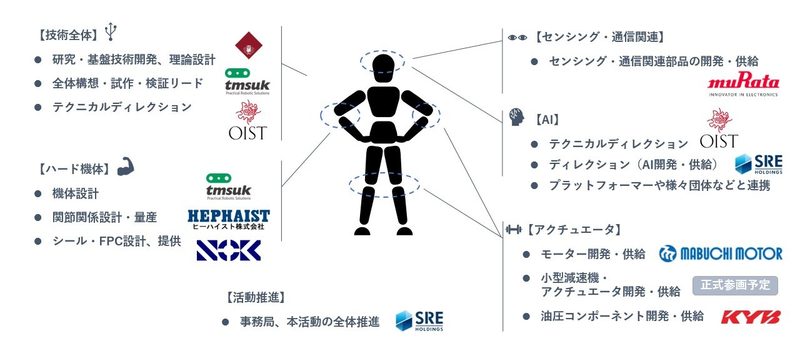
KyoHA参加者と役割(10月時点)
「ヒューマノイドのための日本連合」として、二足歩行・人型サイズのロボット製作を目的とする「京都ヒューマノイドアソシエーション(KyoHA)」が6月に始動した。2026年3月までに課題抽出のためのプロトタイプを製作し、その後は災害対応や建設現場向け「パワー重視モデル」の開発を構想する。KyoHAでロボットの全体構想・試作・検証リードを担うテムザックの高本陽一代表取締役議長は「人型の形・サイズならば、人間用の設備や道具をそのまま使える。言わば『現場フレンドリー』なロボットとなる」と意義を語る。

高本氏
◇人型ロボットが次の自動車産業に
KyoHAは、人型ロボット製作に当たり純国産を志向する。主な理由は、人型ロボットの部品が多く、広大なバリューチェーンを形成し得ることだ。KyoHA事務局SREホールディングスの佐々木啓文氏は「人型ロボット産業は現在で言う自動車のような、完成機メーカーを頂点に多層構造のバリューチェーンを形成する産業に今後なっていく」と話す。米中の激しい開発競争に対抗してバリューチェーンを構築するため、KyoHAは日本の技術力を結集する枠組みの役割を担う。

佐々木氏
現在、中国が人型ロボットのパーツ市場で大きなシェアを握り、ロボット稼働時のデータがパーツ経由で中国に多く送られている。このデータの差が、現実世界を認識し機体を働かするためのフィジカルAI(人工知能)の開発力の差につながる。佐々木氏は「Chat(チャット)GPTをはじめ言語などを認識・生成するAIと異なり、フィジカルAIに必要なデータは現実で機体を動かして得る必要がある。ロボットを自国で製造できるかどうかは、フィジカルAIを自国で開発できるかどうかも左右する」と技術面の意義も補足する。
◇人型機体が必要な現場とは
機体を人型にする理由は高い汎用(はんよう)性だ。階段やエレベーター、電動工具など人間用の設備・道具を人間のように扱えるため、ロボットフレンドリー化が難しい現場に向く。二足歩行ロボットの稼働データは多脚など別種のロボット用フィジカルAIにも活用可能であり、開発面の汎用性もある。
テムザックは、鹿島と共同開発する天井施工用ロボットなど、以前から建設現場向けロボット製作に取り組んでいる。高本氏は「用途や動作が決まっている場合は、人型でない機体でよい。物の配置や必要な動作が頻繁に変わる現場に人型が求められる」と説明する。同様の現場は医療機関や化学実験を行う研究機関にもある。そちら向けに、建設現場向けと別の「俊敏性/機能性重視モデル」を並行して製作する。
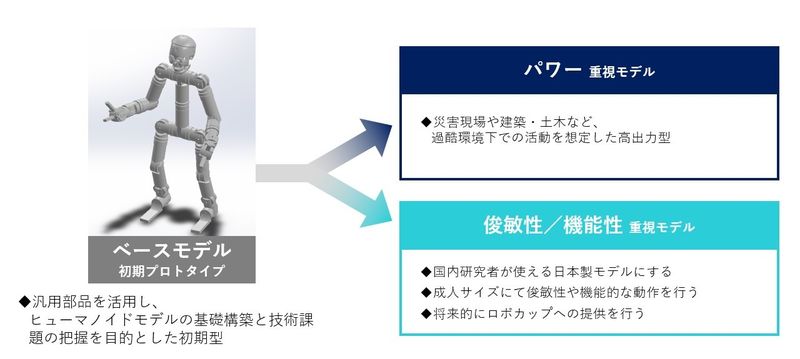
開発方針
◇じたばたしつつ動きを覚える
高本氏は人型ロボットについて、現状を「人間の赤ん坊が、じたばたしつつ体の動かし方を覚えている段階」に例える。「足下に偶然落ちていた障害物に足を取られるなど、バーチャル空間では再現しきれない現実の中で稼働データを蓄積することで、現場の多様な状況に対応可能となっていく。試験導入などで失敗やぎこちなさを見せるかもしれないが、それを糧に災害対応や建設現場で人間と連携して働けるレベルを目指す。自動車などと同様、大量生産するほど機体を低コスト化でき、現場に導入しやすくなる」と将来像を描く。
KyoHAについて
国産ヒューマノイド(人型)ロボット開発体制を構築するため学術機関・企業が集まり6月に始動、9月に一般社団法人となった。設立メンバーは早稲田大学、テムザック、村田製作所、SREホールディングス。10月に沖縄科学技術大学院大学、マブチモーター、カヤバ、NOK、ヒーハイストが加わった。
国産ヒューマノイド(人型)ロボット開発体制を構築するため学術機関・企業が集まり6月に始動、9月に一般社団法人となった。設立メンバーは早稲田大学、テムザック、村田製作所、SREホールディングス。10月に沖縄科学技術大学院大学、マブチモーター、カヤバ、NOK、ヒーハイストが加わった。