

熊谷組は、AI(人工知能)により、複数台の不整地運搬車(クローラーキャリア)を自動走行させる技術を開発した。教示運転に基づく単独の自動走行と、AIによる制御を組み合わせた技術で、2台以上の車両のスムーズな運行と、オペレーターの介在を少なくする省人化を可能とした。今後、効率的な土砂運搬作業など新たなサービスの早期展開を目指し、開発を継続していく。

2台の不整地運搬車がAIにより常時制御され、干渉し合うことなくスムーズに運行 (技術研究所でのデモ走行)
そこで熊谷組は、土砂の運搬作業の安全性と生産性向上を目的として、複数台の車両が同一経路を往復する時に走行・停止を自動制御させるAI制御技術を開発した。
複数台の不整地運搬車が繰り返し自動走行する際に、衝突などが発生しないように安全な運行を制御させるためには、これまで土砂積載の遠隔操作オペレーターのほかに、安全確認を行いながら不整地運搬車の自動走行を行うオペレーター1人が必要とされていた。自動走行中も衝突などがないよう常時オペレーターによる監視が必要だった。しかし、AI制御によって監視作業が不要となるため、土砂積載から土砂搬出までの一連の作業がオペレーター1人でできるようになる。
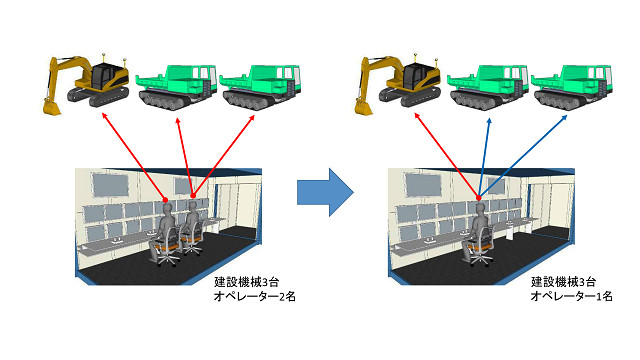
オペレーター1人でもスムーズな運行が可能
教示ステップは、あらかじめオペレーターがカメラ画像により走路を確認しながら教示運転を行い、教示経路データを作成する。分析ステップは、教示経路、車両サイズ・遠隔操作といった条件に基づき、複数車両のすべての走行位置を算出し、安全な位置関係や衝突の可能性がある位置関係をAIにより計算し、安全な状態だけを選ぶ。
計画ステップでは、AIは与えられた経路の始点・終点の位置、土砂積み込み、土砂廃棄といった作業目標を考慮し、すべての位置関係の状態から最もコスト・時間が最小となる効率的な運行計画パターンを生成する。
分析、計画ステップによって、AIによる運行計画パターンが生成され、実行・指示ステップでオペレーターは操作盤のスタートスイッチを押すだけで、複数台の不整地運搬車は常時AIによって進行・停止の判断がなされ、衝突することなく効率的に進行・待機を繰り返し、所定の作業目標を達成する運行を行う。
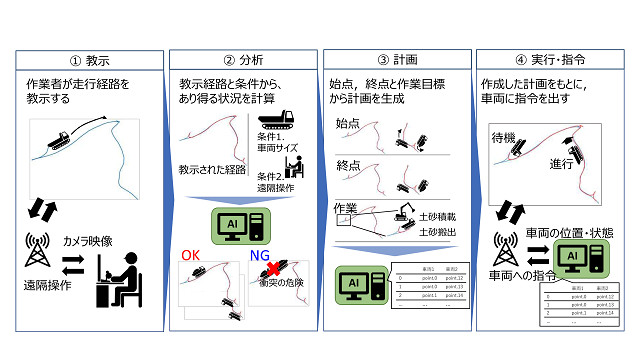
AI制御フロー
2018年9月に熊本県の阿蘇大橋地区斜面対策工事で、土砂運搬の実施工に今回の技術を導入した。オペレーター1人による遠隔操作バックホウ1台と、AI制御不整地運搬車2台による土砂積載・土砂運搬・土砂搬出の一連の作業を検証し、AIによる効果を確認している。
今後の展開として、AI制御技術をさらに向上させるとともに、現場ごとの条件を反映させた精密な運行管理、さまざまな現場に合わせた多様な装備の開発、運行管理の見える化による現場マネジメントの高度化などを目指すとともに、安全面や運用方法を十分に検討し、本格的な実運用に向けて準備を進めていく。