

大林組は、BIMの3次元モデルとクレーンに取り付けたセンサー情報を連携したクレーン操作のマシンガイダンス(MG)システムを開発した。クレーンオペレーターは、目視できない周囲の位置関係なども画像で確認しながら操作できるため、熟練オペレーターでなくても制約の多い現場での作業が可能になる。今後は、このシステムをベースにAI(人工知能)・IoT(モノのインターネット)、ロボティクス技術を組み合わせてクレーンの自動・自律運転の実現を目指す。

操作室内のタッチパネル
開発したシステムは、クレーンのアームに当たるジブとタワーにジャイロセンサーを取り付けて角度、旋回角度の情報を取得し、クレーンの位置をRTK-GNSSで取得する。センサーから取得したクレーンの動きと建設現場を再現した3次元モデルを融合し、現実でのクレーンの動きを3次元モデル上で再現してクレーン操作室内のタッチパネルに表示する。モデルには、実存の構造物だけでなく、目に見えない電波伝搬路や航空法の高さ制限、敷地境界線なども表示でき、作業禁止範囲に侵入しそうな場合は、画面上で警告する。3次元モデルに反映できないクレーン下の状況は、クレーンから下向きに設置したカメラ映像をもとに、AIがフックや柱、作業員などの位置を認識し、吊り荷と構造物との接触、作業員の吊り荷直下への侵入などを検知して警告する。
オペレーターは、タッチパネルを操作して任意の視点や俯瞰(ふかん)的な画像を見て、クレーンの周囲の位置関係を確認しながら作業できる。揚重対象となる部材の取り付け位置を画面上で選択すると、現在位置からのクレーン操作量を数値化して画面に表示し、誤差数cm単位でのガイダンスが可能となる。
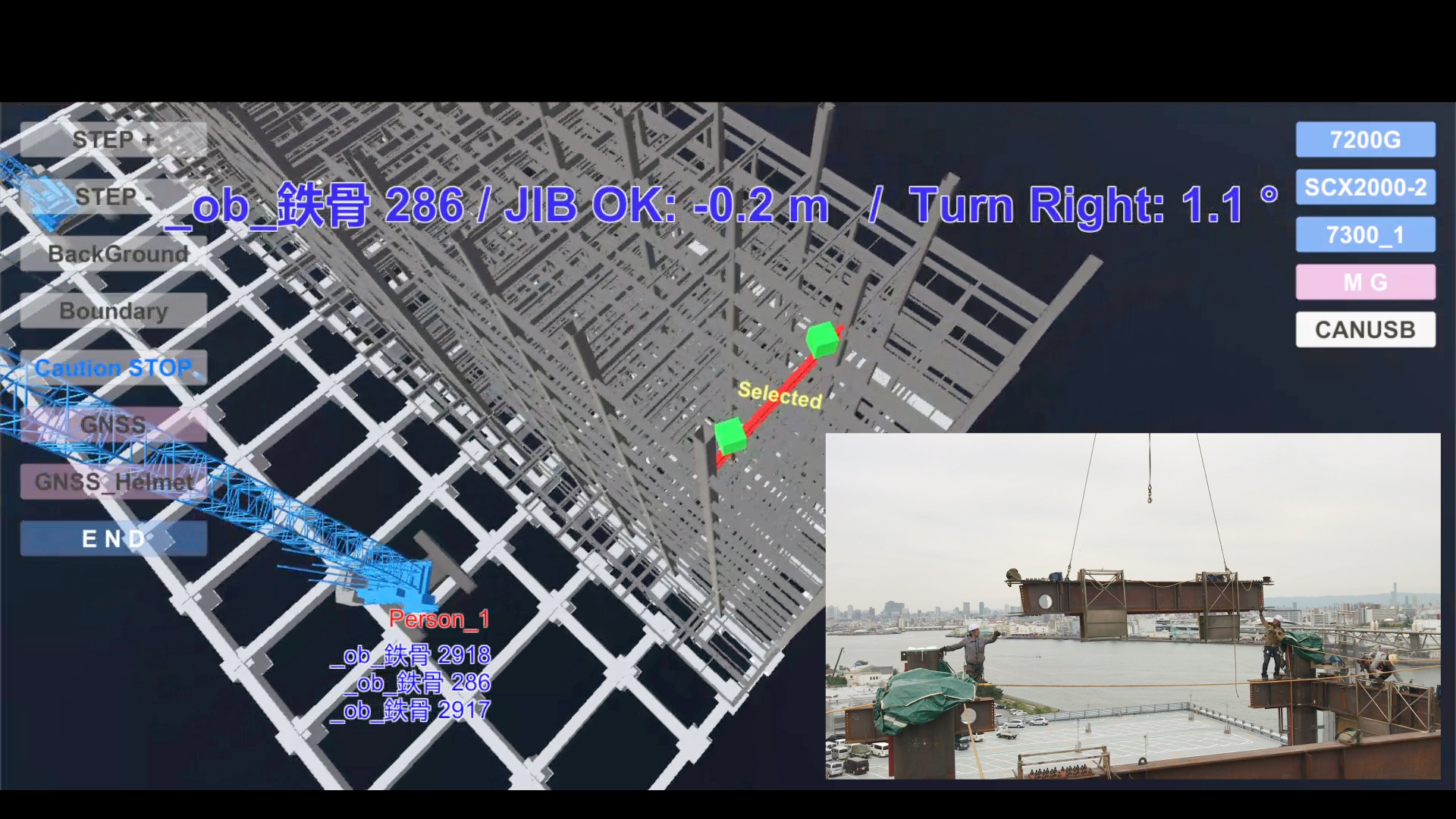
クレーン操作量の数値化表示