
情報通信研究機構(NICT)は、ドローン同士が直接通信し合うことで自動的にニアミスを回避する実験に成功した。内閣府の革新的研究開発推進プログラムにおける「タフ・ロボティクス・チャレンジ」の一環で開発を進めており、プログラム・マネージャーの田所諭氏は「同時に多数の飛行体を使った災害対応を可能にする実用技術だ。飛行ロボットの災害現場での運用がさらに進むことを期待している」とコメントした。
近年、災害現場での現況調査や建設工事の測量などさまざまな場面でのドローンの活用が広がっている。ただ、ドローン同士やドローンと有人ヘリコプターによるニアミスなどが報告されるようになっている。ドローンを目視外で運用する場合、あらかじめプログラムした飛行経路や飛行方法に従って自動で飛行を制御したり、ドローンに搭載したカメラなどを使って操縦する方法が採用されてきた。ただ、プログラムでの飛行では、予期しないほかのドローンや有人航空機の接近に対応できない。カメラなどを見ながらの操縦も、周辺状況を把握することは難しい。
NICTでは、機体間通信による位置情報共有システム「ドローンマッパー」の研究開発を進めてきた。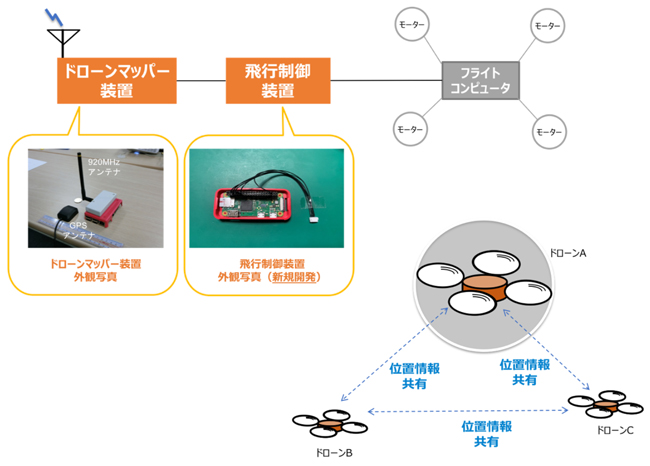 今回、ドローン同士の機体間通信で位置情報や識別番号を共有するだけでなく、位置情報をドローンの飛行制御に生かす装置を試作した。ドローンマッパーで共有する周辺のドローンの位置情報に基づいて、接近を検知し、接近したドローンの飛行方向から自らのドローンの飛行速度や飛行方向を制御するコマンドをフライトコンピューターに出力する。これにより、ドローンが自動で他のドローンとの接近を回避したり、追従したりできる。
今回、ドローン同士の機体間通信で位置情報や識別番号を共有するだけでなく、位置情報をドローンの飛行制御に生かす装置を試作した。ドローンマッパーで共有する周辺のドローンの位置情報に基づいて、接近を検知し、接近したドローンの飛行方向から自らのドローンの飛行速度や飛行方向を制御するコマンドをフライトコンピューターに出力する。これにより、ドローンが自動で他のドローンとの接近を回避したり、追従したりできる。
実験ではドローンマッパーと飛行制御装置を搭載した複数のドローンが、40m程度に接近した段階で自動的に回避行動を取って安全距離を保ったまま目的地まで到達することを確認した。災害時だけでなく、多数の飛行ロボットの群制御による広範囲での情報収集にも活用が期待される。
複数ドローンの制御については、東京都市大も新しいアルゴリズムを開発したことを2018年11月に発表していた。
