

東急建設とTHK(東京都港区、寺町彰博社長)は、建設現場の資機材搬送を自動化するロボットを2020年春の商用化を目指して開発している。最大1tの資材を乗せた平台車をけん引することができ、狭くゆとりのない通路や段差などがある環境でも使用可能。THK独自の自律移動制御システムを搭載し、現場作業車にプログラミングの知識がなくとも搬送経路の設定を簡単かつ素早くできるため、日々変化する作業環境にも対応できる。
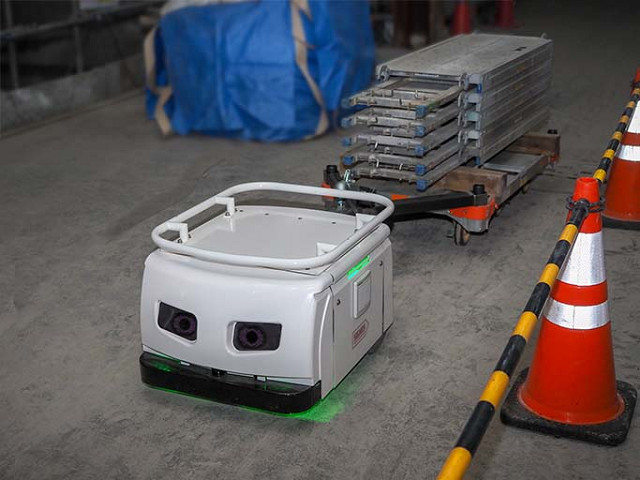
建設現場用搬送ロボット
東急建設技術研究所メカトログループの中村聡グループリーダーは、「THKの開発したAGVはフラットで障害物のない工場内で運用するもので、そのままでは建設現場に適用できなかったため、段差の乗り越えなど共同研究開発を実施することになった」と共同開発に至った経緯を説明する。
課題となっていた段差についてはロボット単体で50mmまで乗り越え可能とした。都内の大規模マンション工事現場で実施した実証実験では、1tの資材をけん引した状態で鉄板による段差をクリアし、20mmまで乗り越え可能であることを確認している。
また、傾斜についてもけん引状態で3度まで対応可能。動力には高出力モーターを2基搭載し、左右輪を独立して駆動することで前進、後退、旋回の動作をスムーズに制御する。進路上の障害物はレーザーレンジファインダー(光波測距儀)とバンパーセンサーで検知し、進行方向が妨げられた場合は安全に停止できる。
同ロボットの導入によって搬入作業に従事する人員を削減し、ほかの作業に配置することで、30%の作業効率向上を目指す。商用化に当たっては、建設現場へ導入しやすいようレンタルでの提供を予定している。
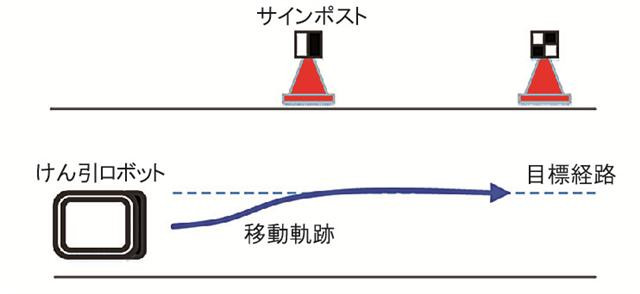
「SIGNAS」の制御イメージ