

関東地方を中心に警備業や関連事業を展開するVOLLMONTホールディングス(東京都青梅市、望月武治社長)は、ロボット技術を活用した交通誘導警備用システム「誘導ロボ1号」の開発を進めている。業界初のディープラーニングで交通弱者を認識する機能などを搭載しており、人感センサーとネットワークカメラで認識した歩行者や自転車をバーとサイネージで誘導する。2020年の実用化を目指しており、8月から同社の交通誘導警備の現場で実証実験を開始する。
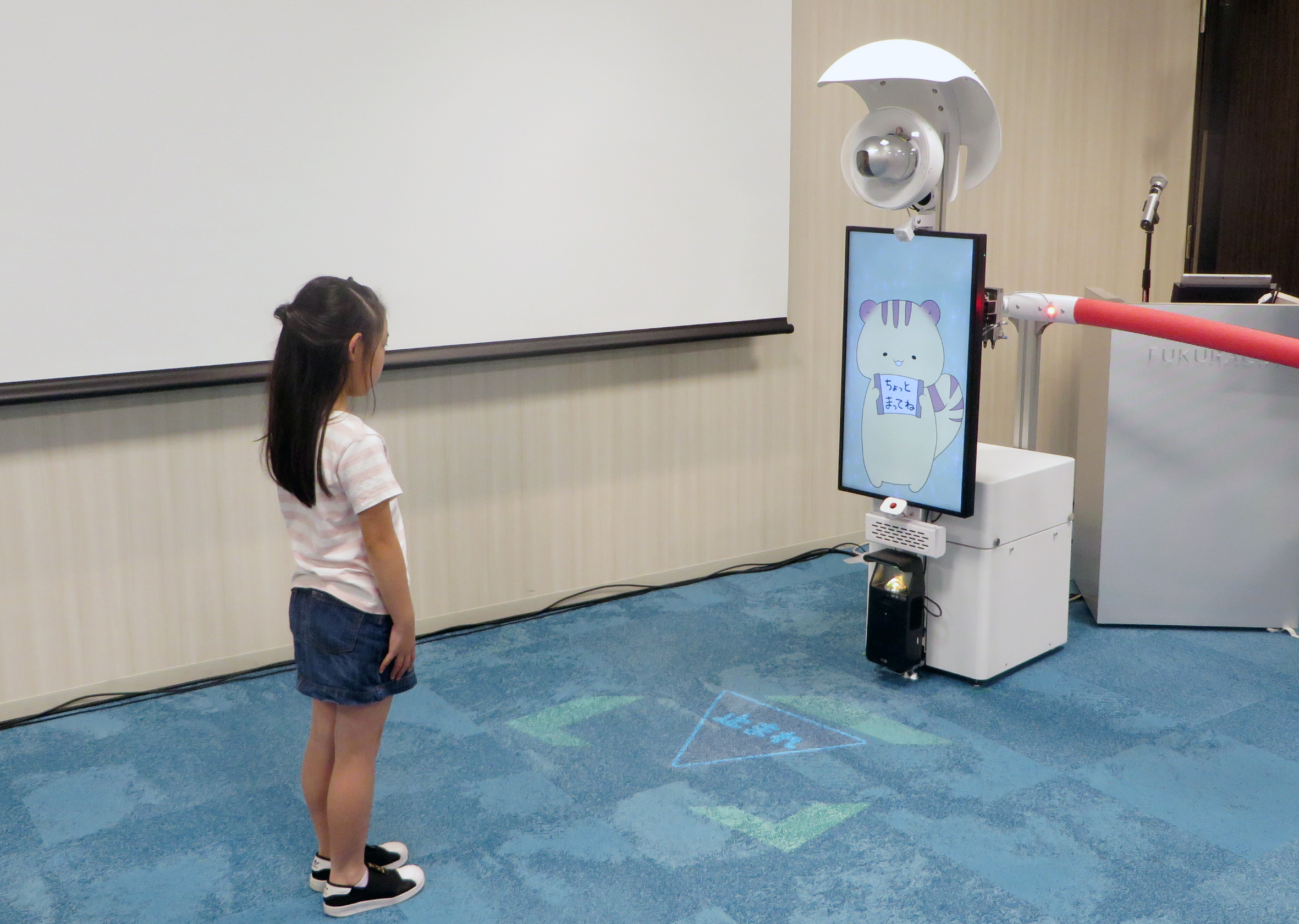
子どもを識別するとキャラクターで案内を表示
望月社長は開発の動機として、安全への貢献や「炎天下や冬の寒さなどの劣悪な仕事環境」「人手不足で警備要員を確保できず工事ができない」といったことへの問題意識を挙げる。これらの解決策の1つとして「ロボット化」を提案し、ハードウェアとシステムインテグレーションではイクシス(川崎市)、ロボットデザインはオチュア(東京都千代田区)、ディープラーニングなどのソフトウェアはシステム計画研究所/ISP(同渋谷区)の協力のもと、「誘導ロボ1号」の開発に当たった。望月社長は「建設業では無人化が進んでいるが、交通誘導も人に変わって機械が担えないかと考えた」と述べる。
左から二本栁知広VOLLMONTセキュリティサービス取締役営業副本部長、誘導ロボ1号、望月社長、山崎文敬イクシス代表取締役Co-CEO兼CTO、星野裕之オチュア代表
実用化は20年をめどとしており、まずは自社の警備現場の安全性向上に活用することを想定している。その後、25年前後には警備会社や建設会社へリース形式で全国へ展開させることを目標としている。