

富山県立大学、日東建設、ボーダックはインフラ点検用の壁面走行ロボットを開発した。機体が垂直な壁面を走行しながら鋼球で打撃し、構造物の健全性を調査する。人が入りにくい構造物の表面を活用することで、安全かつコストを抑えた点検が可能となる。2020年度の発売を予定している。
壁面を走行しながら鋼球を打撃し、浮きや剥離を検出する
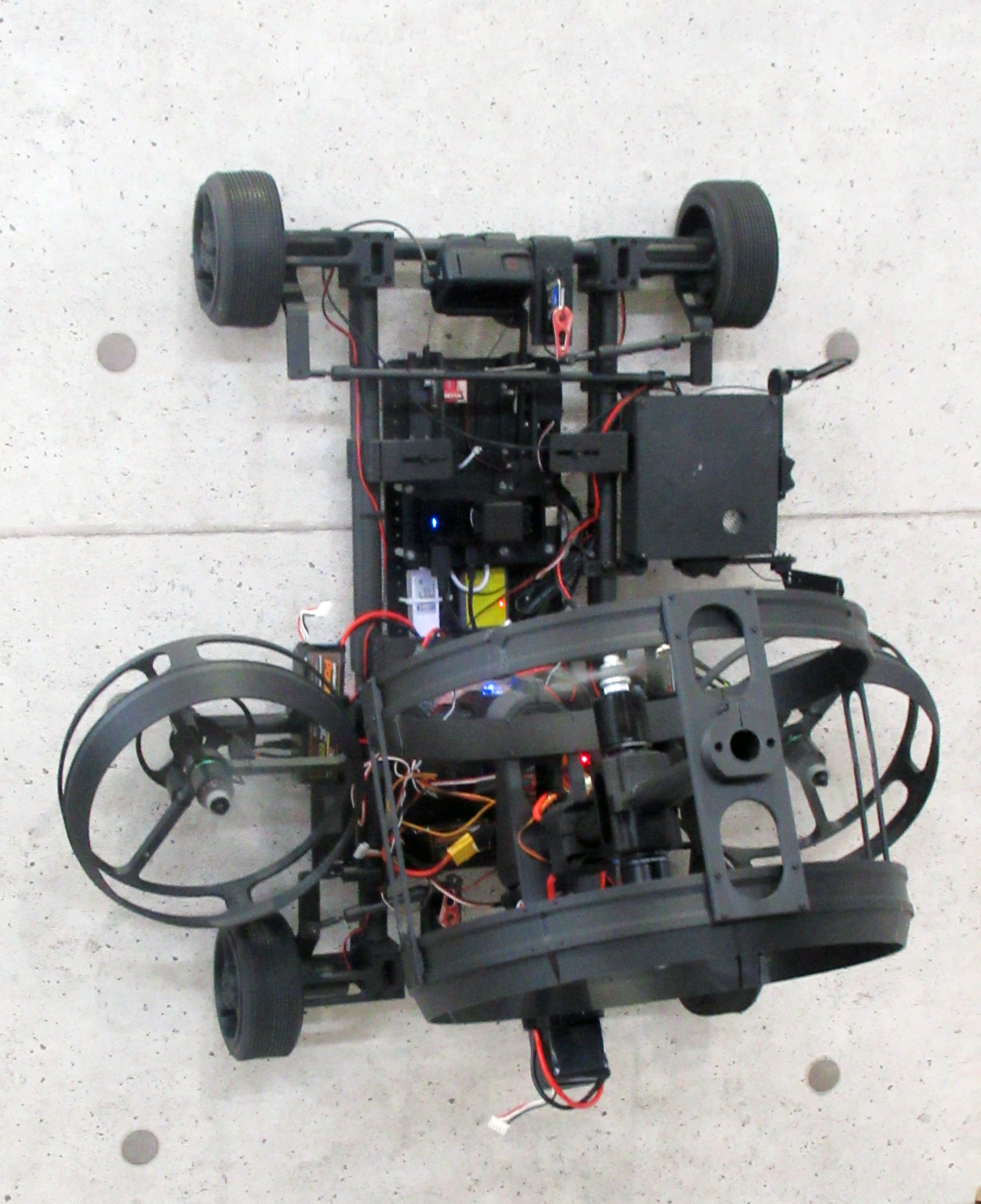
ロボットは自重用プロペラで機体の重量を相殺し、吸着用プロペラで機体を壁面に押しつけて走行する。地上から送信機で遠隔操作する。
走行しながら壁面に鋼球を打ち付け、発生した衝撃弾性波からコンクリート表層の浮きや剥離を検出する。カメラで撮影した動画はモニターでリアルタイムに閲覧可能で、走行中の壁面の状態を目視でも確認できる。
ロボットのフレームは3Dプリンターで製作。カーボンを採用し、軽量で剛性が高い。バッテリー駆動だが、有線で給電しながらも使える。
既に富山県内の橋脚や建築物の点検に導入し、有効性を確認している。
今後は診断結果の解析にAI(人工知能)を活用し、わかりやすい調査結果の出力などに取り組む。