

熊谷組と東京工業高等専門学校は、遠隔操作建設機械の傾きや振動・音を映像と同時にリアルタイムで提供する「無人化施工VR(仮想現実)技術」を開発した。遠隔操作でありながら、実際に搭乗した状態に近い環境をオペレーターに提供することで、建設機械を傾斜地などで運用する場合でも安全・効率的な操作が可能になるという。熊谷組の北原成郎土木事業本部ICT推進室長は「危険な現場で短時間使うのであれば、いますぐにでも対応できる」としながら「画質を良くするなど、どんどん改善していきたい」と話している。
無人化施工VR技術
バックホウなどの掘削機械は、掘削自体の動作や掘削土砂をつかんだ状態での旋回など、重心の変化が生じる作業を行う。このため、傾いた状態での掘削作業は機械の転倒を招くため、水平状態の作業が基本となる。
また、不整地運搬車など運搬機械の走行も日々変化する起伏の多い工事用道路を走行するため、予期できない左右の傾斜などによる転倒の危険性が高くなる。俯瞰映像による遠隔操作は建設機械の傾きの把握が困難なため、安全性を重視すれば作業時間の遅延が生じる。
そのため、遠隔操縦室内にいるオペレーターに、建設機械のコクピット内からの視界のほか、建設機械の傾きや振動・音を提供することで、搭乗操作に近い感覚で遠隔操作可能な安全・効率の高い無人化施工VR技術を開発した。

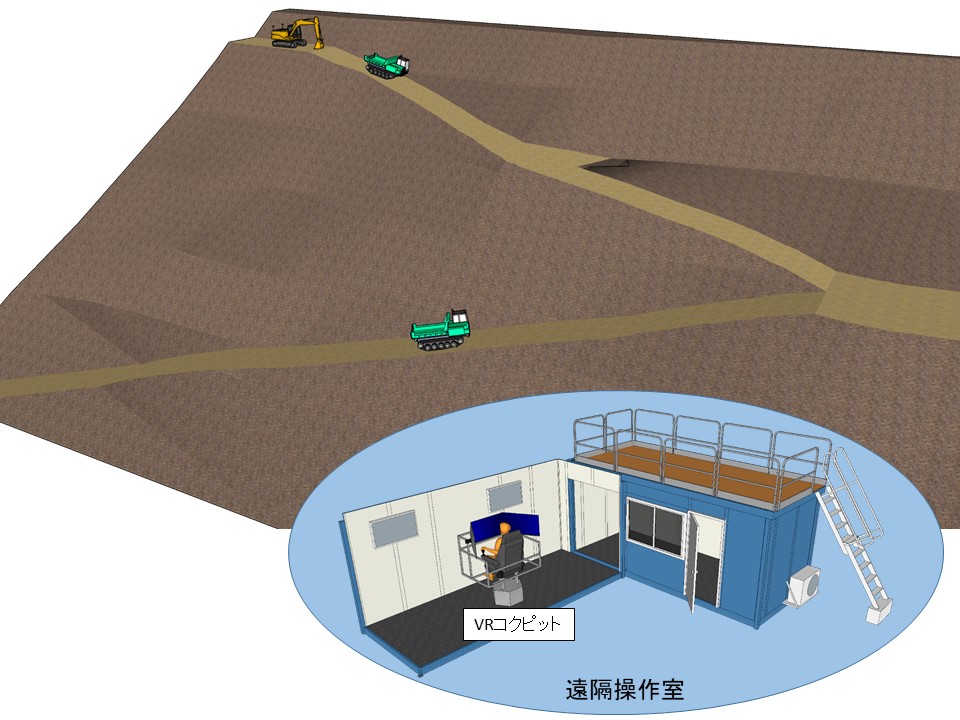
遠隔操作状況
システムは建設機械側と遠隔操作室側に分かれている。建設機械側では、360度カメラと加速度センサーをコクピット内に取り付け、搭乗操作目線での映像と音、機械の動きを記録し、配信する。遠隔操縦室側では、ジョイスティックで建設機械を操作し、遠隔操作された建設機械側で記録した360度映像をディスプレイとヘッドマウントディスプレイで再生すると同時に、建設機械の動きのデータによりモーションベースで駆動する。

360度カメラ
遠隔操作室側の操作信号と建設機械側の映像と動きのデータの無線転送には、熊谷組が長崎県の雲仙普賢岳などの災害復旧工事で確立した複数の建設機械を操作室から遠隔操作するネットワーク対応型無人化施工システムの要素技術が生かされた。
北原ICT推進室長は「大学や高等専門学校の良い技術をうまく取り入れ、早く世の中に出すことも大事な仕事だ。Society5.0という新しい枠組みに沿って、われわれも研究、技術開発を進めていきたい」と展望を語る。