

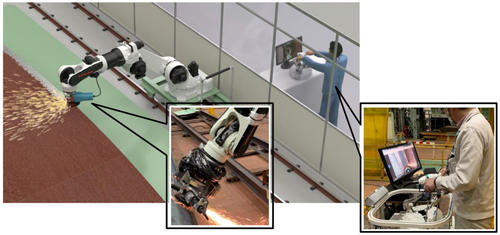
川崎重工は、溶接構造物の研削や鋳造製品のバリ取り、仕上げ加工に適用可能な遠隔操縦型グラインダーロボットシステム「Successor-G」を開発した。2020年4月から販売を開始する。
研削工程
Successor-Gは、同社のロボットビジネスセンターが開発した遠隔で熟練技術者の動きを再現するロボットシステム「Successor」をベースに、エネルギー・環境プラントカンパニーの大型構造物生産ノウハウと技術開発本部のソフトウエアを加えて開発した。遠隔操縦で各種作業が可能なほか、作業者の動きを模倣して繰り返し運転するトレース機能や仕上げ状況を画像処理することで自動判定運転も可能になる。仕上げ状況を3次元計測し、仕上げ面の凸凹を数値化して運転データを自動生成しつつ、仕上げ状態を自動判定する機能の高度化も目指す。
販売に先立ち、播磨工場内で製品への適用を進めているほか、同工場の技能教育センターに顧客の導入検討をサポートするテスト装置を設置し、実演・各種テストを実施する。18-21日に東京都江東区の東京ビッグサイトで開かれる「2019国際ロボット展」でも実機を展示し、体験会を開催する。