

大林組は、慶応大学と共同で、機械の先端が触れた物体の硬さや柔らかさをオペレーターに伝える技術「リアルハプティクス」、油圧駆動重機に適用するシステムを開発した。実験装置を使った検証作業を進めており、今後、実際の重機を使った実証実験を進めるとともに、オペレーター側のアーム型指示装置の開発を進める。熟練オペレーターの操作をデータ化することで若年技能者へのトレーニングにも展開する考え。 リアルハプティクスは、実際の物体や周辺環境との接触情報を双方向で伝送し、 力触覚を再現する技術で、 慶応大グローバルインスティテュートの大西公平特任教授が開発した。 既存のハプティクス(触覚技術)と異なり、機械駆動部が受ける反力を利用する点が特長で、触覚を検知するセンサーが少なくなるほか、操作側と駆動側の力の倍率や距離の倍率を任意で設定できるため、 わずかな力の操作で大きな駆動力を出せる。
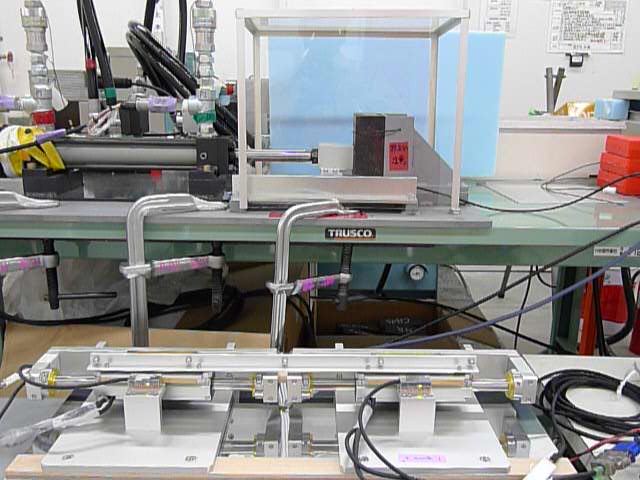
実験装置を使った検証。奥が油圧制御のスレーブ、手前が電気制御のマスター
今回開発したシステムでは、一般的な重機に適用するため、油圧駆動制御に適した情報処理手順を開発し、システム化した。オペレーターの操作指示に基づいて重機がリアルタイムで駆動するとともに、対象物を正確につかめているか、破損させてはいけない重量物を適切な力加減で持ち上げているか、といった感覚を感じながら作業できる。制御機構の追加や操作機器の改造だけで既存の油圧駆動の重機に搭載できる。
視覚・聴覚以外の感触を得ながら重機を操縦できるため、安全性と効率性が上がるほか、遠隔地での操作が必要な災害復旧工事でも、効果を発揮するとみられる。