

カメラ業界最大手のキヤノンが自動搬送台車(AGV)・自律走行搬送ロボット(AMR)用のソフトウェア市場に参入した。機械・ロボットの“目”となる映像解析ソフトで同社の技術を利用できるようになり、建設現場向けAGVなどの開発を進めている建設業界にとっても大きな味方を得たことになる。事業企画を担当する岡本和俊氏は、「まずは『VisualSLAM』の市場で世界ナンバーワンを取りたい」と意気込む。
左から藤木氏、小竹氏、岡本氏
SLAMは、自己位置の推定と周辺環境地図の作成を同時にできる技術。GNSS(衛星測位システム)が届かない場所でも、機械やロボットがいる場所の地図を作成し、その中の自らの場所を特定できるため、建設業でも建築現場内の自律走行ロボットなどに適用されるケースが出てきている。床などに貼った磁気テープを読み取るテープ式に加え、レーザーで物体との距離を測るLiDARを使うSLAM方式があり、AGV市場でも両者が主流となっている。
キヤノンは創業以来、光学技術を中心とした映像技術の革新を重ね、高性能なカメラやレンズを生み出し、長年にわたってMR(複合現実)の技術も培ってきた。その技術を生かし、AGVソフトの市場でもカメラの映像を基に自己位置推定と環境地図作成を行うVisualSLAMを含む映像解析ソフトで勝負する。岡本氏は、「得意とする映像解析とカメラの延長線上に高度なVisualSLAMを開発できた」と経緯を説明する。
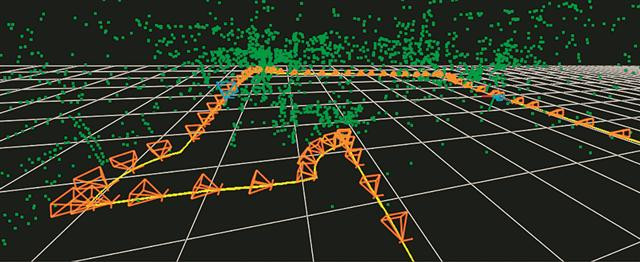
自己位置推定による移動軌跡
強みは「幅広い領域を高精度に位置計測できる」(開発担当の小竹大輔氏)という点だ。レーザー方式のSLAMの場合、レーザーを照射する面(2次元)での位置把握となり、レーザーが届かない上下方向の物体を把握しにくいという弱点がある。カメラ方式であれば「上部も含めて、水平面・垂直面の幅広い画角で撮影した範囲の特徴点を抽出できる」(小竹氏)という。
もう1つの強みが、「レイアウト変更の多い現場でも、高精度に位置・姿勢を計測できる」(同)という点だ。AGVで活用する場合、「まずは初期設定として、その場所の特徴点を把握して地図をつくり、位置計測する」(同)という流れになる。その中で、「地図をつくった時と位置計測する時の状況が同じことが基本だが、ある程度、置いてあるものが変わっても許容範囲内であれば、位置計測を継続できる」(同)という。既に工場内では対応できることを検証済みだ。「(壁が増えるなど)何日かかけて徐々に環境が変化する状況には対応可能で、何度も往復すれば地図の精度も上がる」(開発担当の藤木真和氏)という。あるAGVメーカーの顧客は、LiDAR式のSLAMを搭載したAGVの性能に懐疑的だったものの、「『VisualSLAMは使える』と言ってもらえた」(岡本氏)というように、性能には強い自信をみせる。
建設現場で資材などを運ぶAGVを開発する際に最もネックになるのが、このレイアウト変更の多さだ。工事の進捗に応じて通路や搬送ルートが変わるため、テープ式など現場に目印を付け、その目印を読み取りながら動くAGVは実用に適さないと言われる。通路上空に支障物がある場合も少なくない。カメラの広い範囲の映像を基に、レイアウト変更に対応できるAGVが実現できれば、大きな進歩となりそうだ。
同社は、VisualSLAM技術を含む映像解析ソフトで、「ファーストステップとして、AGV市場で高いシェアを獲得したい」(岡本氏)と狙う。「(カメラを使った)イメージングの技術に賛同するAGV・AMRメーカーのパートナー企業を各分野で見つけ、ソリューションとして提供する」(同)という考えで、その先に見据えるのが、VisualSLAM市場での世界シェアナンバーワンだ。AGVで世界ナンバーワンを目標に掲げる日本電産グループの日本電産シンポと最初の協業を決めたことも、そうした戦略の一環だ。
建設現場のAGVでの活用も、「建設業に特化したソフトではないが、建設現場の状況に応じて必要な機能を検討できる。ぜひ建設業界のニーズを聞きたい」(同)と前向きだ。キヤノンの映像解析技術が建設現場の働き方を変える日が来るかも知れない。

映像解析ソフトを搭載した日本電産シンポのS-CART-V(ポーター)