

地域密着の維持工事にもデジタル化の波――。金杉建設(埼玉県春日部市、吉川祐介代表取締役)、アクティブ・ソリューション(横浜市、島村明代表取締役)、創和(千葉県船橋市、西尾貴至代表取締役)、ARAV(東京都文京区、白久レイエス樹代表取締役)の中小・ベンチャー4社連合が、河川堤防の草刈り作業に使う「大型自律走行型草刈り機」の開発に成功した。今後、人を含む障害物の自動認識・機械停止といった安全面を第一に、実際の堤防で各種機能の検証に入る。

国土交通省の2020年度「建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト(通称PRISM)」に採択されている試み。20年11月の選定以降、ハード・ソフト両面の開発を進め、2月初旬に初号機を完成させた。
既存の大型草刈り機をベースに、全方位レーザースキャナーやGNSS(衛星測位システム)アンテナ、3次元(3D)モーションセンサー、深度カメラ、無線LANアンテナなどを搭載した。
全方位レーザースキャナーのイメージ
傾斜のある河川堤防では、Uターンは平面個所で行うなど特有のルールが定められている。システムのカスタマイズに試行錯誤を重ねながら、「柔軟に自律走行の経路を設定できるようにした」(白久代表取締役)。
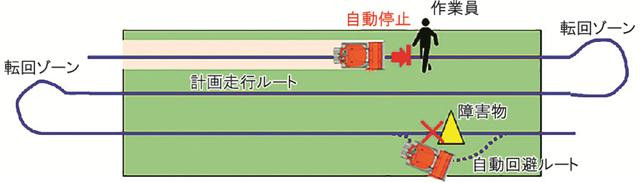
自律走行のイメージ
3月上旬には、金杉建設が受注している「R2三郷・吉川河川維持工事」の現場で試行を始める。対象となる堤防の広さは約1万2000㎡。まずは人の手で自律走行の計画ルートを描き、10cm以下とされている刈り高の精度を含め、正常に動作するかを検証する。
堤防の草刈りは通常の建設工事とは異なり、作業エリアに仮囲いがない。走行ルート上に人を検知した場合、しっかりと自動停止できるかが最大の検証ポイントとなる。堤防に設置されているキロ杭(距離標)などは、あらかじめ位置を特定し自動回避するよう設定。草刈り刃は手前に巻き込む逆転式とし、飛び石を防ぐ。機械前面にはセンシングバンパーも搭載する。
4社連合は20年度、自律走行の基礎となる直進走行と自動レーン移行、障害物検知時の動作(停止・回避)に注力するが、走行経路の事前プログラミング機能や全方位レーザーによる草刈り後の地形計測(出来形管理)も検討する。自動地形認識による自動作業を最終目標に掲げている。
その上で、金杉建設工事部の藤沼修次長は「自動化は手段であり、目的は生産性の向上。まずは1人で1台を管理するが、複数台を運用できるようになって初めて、生産性は飛躍的に上がる」とゴールを見据える。複数台の自律走行と動向管理は既に、技術的に実現可能だが、安全面の確立を最優先に順を追ってステップアップしていく方針だ。
コンソーシアムの代表幹事を務める金杉建設の吉川代表取締役は「地域に密着した維持工事は絶対になくならない仕事であり、ここを省力化できれば、インフラの維持管理という分野の今後にとって、非常に有益になると思う」と今回の挑戦の意図を説明する。維持工事を担う作業員の高齢化と若手入職者の減少はより深刻で、事業の持続可能性という観点からも自動化・デジタル化への期待は大きい。
近年、トンネルやダム、橋梁などの比較的大規模な新設工事では、先端技術の活用が加速度的に進んでいる。これらは現場条件に合わせた単品生産であるが、堤防草刈りなどの維持工事は全国各地に類似の現場が無数にあり、水平展開の余地は圧倒的だ。近い将来、地域維持の風景が様変わりしているかもしれない。

コンソーシアムメンバー。金杉建設は3年連続でPRISMに挑む